In control and system theory the system Gramian matrices of linear input-output systems have wide-spread use, for example in: model reduction, decentralized control, optimal placement, sensitivity analysis or parameter identification. Empirical Gramian matrices correspond to the (linear) system Gramians, but extend to nonlinear systems, due to their data-driven computation. The empirical Gramian framework is an open-source Matlab toolbox, enabling the computation of the following empirical system Gramians:
Empirical System Gramians:
- Empirical Controllability Gramian
- Empirical Observability Gramian
- Empirical Cross Gramian
- Empirical Linear Cross Gramian
- Empirical Sensitivity Gramian (Controllability of parameters)
- Empirical Identifibility Gramian (Observability of parameters)
- Empirical Joint Gramian (Minimality of state and observability of parameters)
Features:
- Interfaces for: Custom solvers and inner product kernels
- Non-Symmetric option for all cross Gramians
- Compatible with OCTAVE, MATLAB and PYTHON (experimental)
- Vectorized
- Shared and distributed memory parallelizable
- Functional
- Open-source
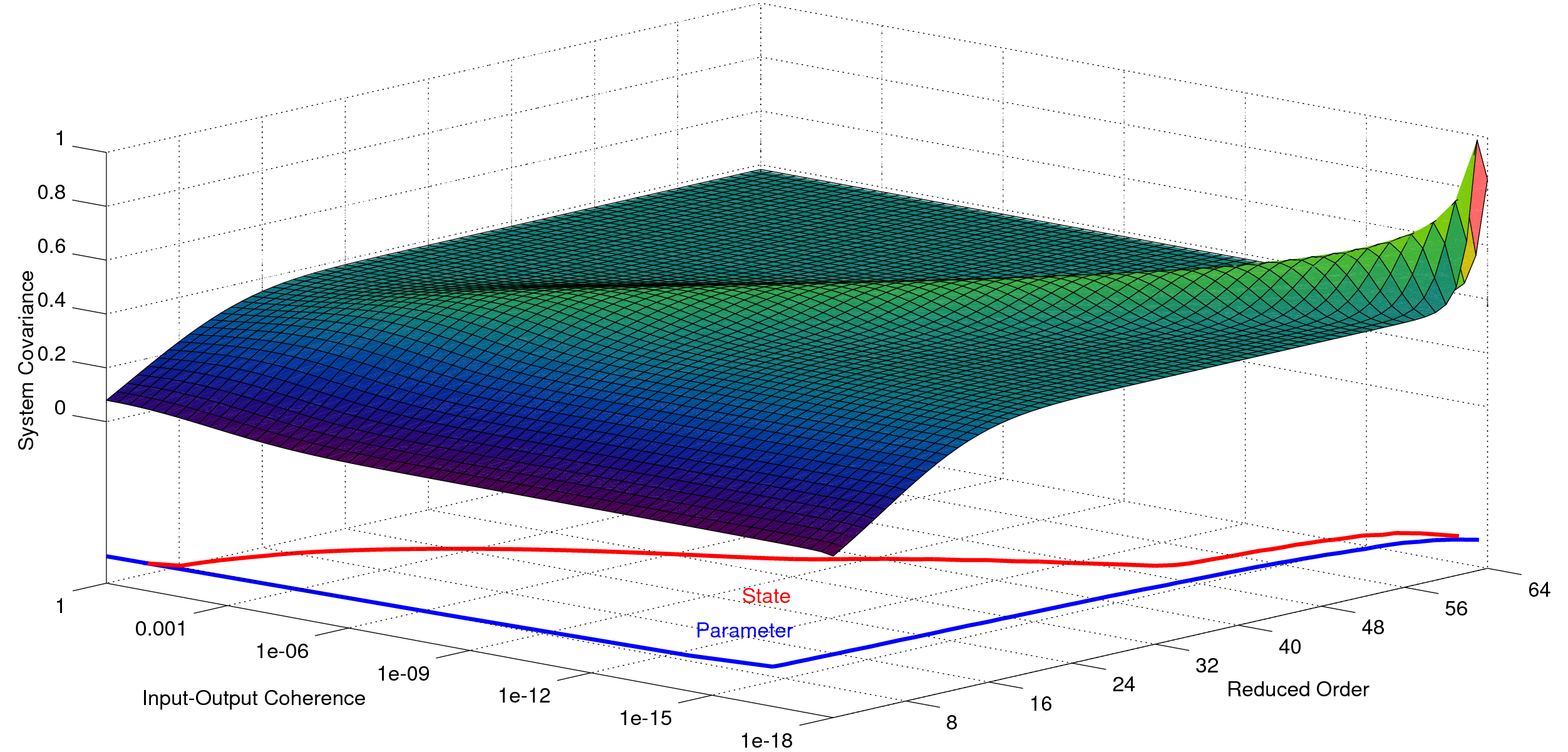
Combined state and parameter reducibility for a nonlinear transport problem with local velocity parametrization.
| Keywords | Matlab, Octave, Gramian, Controllability, Observability |
| Model | |
| Software Type | |
| Language | |
| Platform | |
| Availability | |
| Contact Person | |
| References to Papers | |