Handling editor: Evelyn Sander
The Dynamics of Toys
G. Bard Ermentrout, Department of Mathematics and University Professor of Computational Biology, University of Pittsburgh
and John G. Milton, William R. Kenan Jr. Professor of Computational Neuroscience and Department of Biology, The Claremont Colleges
The ability of toys and play to awaken mathematical curiosity stems
from their interesting motions, which range from periodic oscillations
to even chaos. Since these movements are governed by the toy's
intrinsic physical properties it is relatively easy to generate models
in the form of differential equations. However, can these models
capture the observed dynamics? The increasing availability of
inexpensive, easy-to-use motion capture technologies makes it possible
to quantitatively compare model to toy. These approaches identify a
number of unresolved mathematical problems whose solutions may
ultimately provide insights into why the nervous system is so
fascinated with toys and play.

(Fig. A) The drinking bird.
(Movie B) Movie of drinking bird.
Drinking bird
A large family of toys exploits gravity and the swinging motion of
pendulums. Indeed many carnival rides and "chaotic" toys are
periodically driven damped pendulums. However, by far the most famous
pendulum toy is the drinking bird (Fig. A). The drinking bird's résumé
includes starring roles in cartoons and movies and it functions as the
unofficial mascot for a well-known scientific equipment supplier.
The
characteristic "drinking movements" (Movie B) are the result of a dynamic
heat engine that exploits liquid-vapor equilibrium in order to convert
heat energy into a pressure differential within the device, and hence
perform mechanical work. Evaporative cooling lowers pressure and
causes fluid to rise into the bird's head. Once the mass of the
bird's head becomes sufficiently heavy the head drops and is wetted,
the pressure seal is broken so that fluid returns to the base and the
head is raised again.
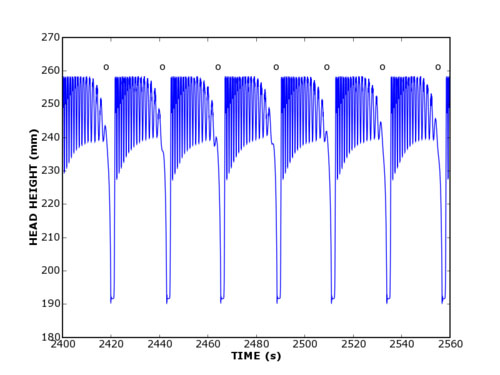
(Fig. C) Time series showing cycle-to-cycle variation in drinking bird wave-forms. This graph was obtained by experimental observation of a drinking bird with a reflective marker on its head.
Up until now the scientific investigations have
focused on determining the thermodynamic efficiency of the bird heat
engine and probing the effects of temperature differentials and
humidity on the period of the bird's dunking motions [1-3]. However,
to see the richness of the range of dynamics of the bird we put a
reflective marker on its head and recorded its movements. Look closely
at the right shoulder of the oscillation dunking cycle (Fig. C)
(indicated by an 'o' above the graph). The waveform morphology is not
constant but instead varies from cycle to cycle. Moreover, it clearly depends on
what the bird is drinking (Fig. CC).
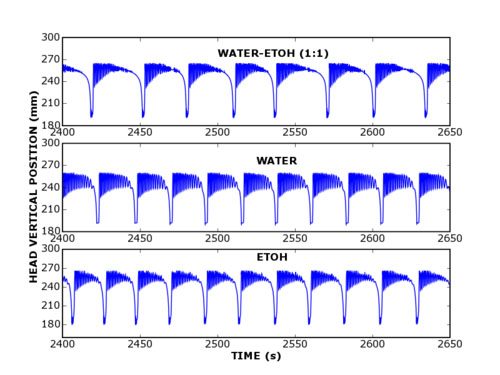
(Fig. CC) A time series recording from a drinking bird using three different types of fluids. This graph was obtained experimentally using the same methods as used in Fig. C.
What does mathematics say about the drinking bird? Well, the
differential equations that describe the motions of the drinking bird
can be readily obtained from a mechanical model (Fig. D) using the
Euler-Lagrange formulation

where the Lagrangian, L, is equal to the difference between the kinetic energy (T)
and potential energy (U), L= T - U,

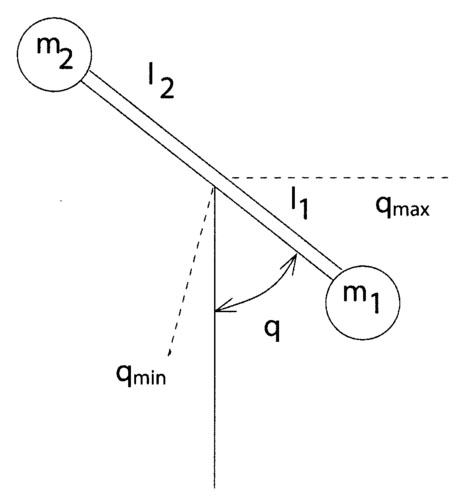
(Fig. D) A mechanical picture of the bird toy model.
Here the total mass is M=m1+m2, and the reset condition is that when θ hits a
critical value, m2 is reset and the velocity is set to zero. In order to
complete the model it is necessary to account for the effects of
evaporative cooling. The simple assumption that evaporative cooling
causes the mass of the bird's head to increase proportional to swinging
speed, i.e.  , yields the predictions of this model (Fig. E). Although
there is remarkable similarity between the predicted and observed
motions of the bird there is one important discrepancy. Namely,
variation in the waveforms are observed experimentally, but they are not
predicted by the model. Certainly the addition of noise to the model
causes the waveforms to vary, but what is the source of the noise?
Maybe the bird model requires us to be more creative about the
description of the evaporative cooling of the bird's head or perhaps
the reset condition is too naïve. Certainly, there are small eddies
created by the motion of the bird and this could provide a source of
"noise" in the evaporation rate. More obviously, look at the movie of
the bird as it hits its base. It does not come to a complete stop,
but, rather, bounces a few times before rocking back. How could this
be modeled? What's your idea? This is where the fun begins.
, yields the predictions of this model (Fig. E). Although
there is remarkable similarity between the predicted and observed
motions of the bird there is one important discrepancy. Namely,
variation in the waveforms are observed experimentally, but they are not
predicted by the model. Certainly the addition of noise to the model
causes the waveforms to vary, but what is the source of the noise?
Maybe the bird model requires us to be more creative about the
description of the evaporative cooling of the bird's head or perhaps
the reset condition is too naïve. Certainly, there are small eddies
created by the motion of the bird and this could provide a source of
"noise" in the evaporation rate. More obviously, look at the movie of
the bird as it hits its base. It does not come to a complete stop,
but, rather, bounces a few times before rocking back. How could this
be modeled? What's your idea? This is where the fun begins.
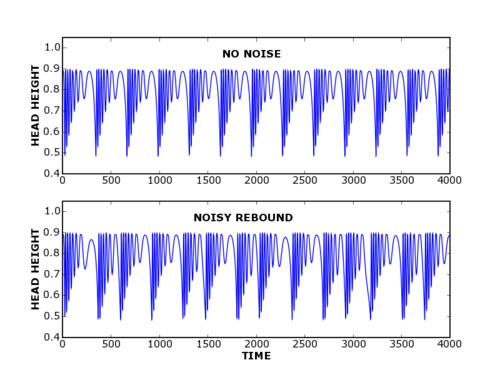
(Fig. E) Numerical simulation of the bird model with and without a small amount of randomness (noise).
Stick balancing
It is one thing to watch a toy in action, yet another to play with it.
Just invert the pendulum and we have a toy that most of us have played
with at one time or the other, namely, stick balancing at the
fingertip (Movie F). The fact that longer sticks are easier to balance than
shorter ones arises because it takes time for the nervous system to
detect the vertical displacement angle and make a correction: once the
stick becomes sufficiently long its rate of movement becomes slow
compared to the correction time and hence balancing becomes
easier. Thus a reasonable model for stick balancing is the delay
differential equation of the form

where θ is the vertical displacement angle (θ=0 corresponds to the
upright position, hence the "-" sign), τ is the neural latency, k is the
damping coefficient, and g is the gravitational constant. Intuitively
the feedback, F, is negative, i.e. when θ increases, F acts in a
manner to decrease iwt. Mathematical analysis of this equation
suggests that the upright position is stable provided that the neural
time delay, τn, is shorter than a critical time delay, τc, proportional to  . In other words, for sufficiently long sticks the upright position
of the stick balanced at the fingertip is stable.
. In other words, for sufficiently long sticks the upright position
of the stick balanced at the fingertip is stable.
(Movie F) This movie shows an example stick balancing on the fingertip.
Play at stick balancing for just a few minutes and you can readily see
that these expectations are not true. For example, even long sticks
fall. In addition, high speed motion capture in three dimensions
suggest that the feedback is positive, not negative and moreover that
the feedback corrections do not occur continuously but in an
intermittent, or "ballistic" manner [4]. More surprising is the fact
that more than 95% of the time intervals between successive corrective
movements are shorter than the neural latency. These observations
highlight the complexity of control in the presence of feedback delay
and noise. In particular, how are those fluctuations that need to be
acted upon by the controller distinguished from those that do not?
This is because, by definition, there is a finite probability that an
initial deviation away from a set point will be counter--balanced by
one towards the set point just by chance. Too quick a response by a
controller to a given deviation can lead to the phenomenon of "over
control" leading to destabilization, particularly when time delays
are appreciable. On the other hand, waiting too long runs the risk
that the control may be applied too late to be effective. Thus
methods based on continuous feedback control are not only anticipated
to very difficult to implement by the nervous system, but also are
unlikely to be effective. As a consequence mathematical attention is
drawn to issues such as control at the "edge of stability" and the
importance of "act and wait" control strategies [5,6]. In other
words without the benefit of motion capture techniques a mathematician
could easily have missed the important range of problems associated
with stick balancing at the fingertip.
(Movie G) This movie shows stick balancing with and without leg shaking.
Most applied mathematicians do not have the opportunity to actively
participate in the scientific method of making quantitative
comparisons between theory and prediction. With the ready
availability of motion capture technologies studies of the dynamics of
toys present unique opportunities to study dynamical systems. The
driving force is the fact that discrepancies between existing toy
models and observed dynamics exist. These discrepancies provide an
opportunity to learn about how complex dynamics of the toy are
impacted by noisy perturbations and the controlling strategies of the
nervous system that plays with the toy.
In 2009 there will be a 5-day workshop at
the Banff International Research Station (BIRS, Nov. 8-13, 2009) on the
time-delayed control of noisy inverted pendulums that uses toys and on-site
motion capture equipment to enable scientists to exchange ideas in a setting
that promotes "mathematicans and science in action." Since physical
properties determine the dynamics of toys, laboratory experiences can
be designed so that differential equations can be readily learned by
students "hands on."
Thus as your children tire of the toys they
received over the holiday season, it might be worthwhile to pick them
up and play with them. Hmmm... interesting mathematics? More
importantly it's actually fun (Movie G).
Acknowledgements
Special thanks to R. Fraiser, J. Gyorffy, D. Jaurequi, R. Knox and T. Ohira.
References
| [1] |
|
Güémez J, Valiente R, Fiolhais C and Fiolhais M (2003). Experiments with the drinking bird. Am. J. Phys. 71: 1257-1263.
|
| [2] |
Lorenz, R (2006). Finite-time thermodynamics of an instrumented drinking bird toy. Am. J. Phys. 74: 677-682.
|
| [3] |
Ng LM and Ng YS (1993). The thermodynamics of the drinking bird toy. Phys. Educ. 28: 320-324.
|
| [4] |
Cabrera JL and Milton JG (2002). On-off intermittency in a human balancing task. Phys. Rev. Lett. 89: 158702
|
| [5] |
Milton JG, Cabrera JL and Ohira T (2008). Unstable dynamical systems: Delays, noise and control. Europhysics Lett. 83: 48001.
|
| [6] |
Insperger T (2006). Act-and-wait concept for continuous-time control system with feedback delay. IEEE Trans. Control Sys. Tech. 14: 974-977.
|