Research on Delayed Dynamical Systems in Budapest
by Gábor Stépán and Tamás
Insperger, Budapest University of Technology and Economics
The Department
of Applied Mechanics is one of the largest departments of
Budapest University of
Technology and Economics. The department is responsible for the
basic mechanics lectures at undergraduate level in mechanical
engineering, and for the advanced mechanics courses at graduate and
postgraduate level for all engineering students. The teaching and
research activities include the whole range of basic mechanics: from
statics, dynamics, and vibrations to elasticity, plasticity, and
continuum mechanics.
 |
| Staff of the Department of Applied
Mechanics. |
The research on delayed dynamical systems was started by
Professor
Gábor Stépán in the late 1970s; the first
basic results are summarised in his book Retarded Dynamical
Systems (Longman, 1989). Now, there are three assistant
professors, two postdoctoral researchers, five PhD students and six
MSc students working on delayed systems, all of them supervised by
Prof. Stépán.

The milling process. |
The interests of the research group are:
- stability analysis of delay differential equations (DDEs),
- bifurcation analysis of DDEs,
- chaotic behaviour in DDEs,
- analysis of DDEs with varying time delay,
- applications (machining processes, feedback control systems,
position and force control in robotics, human and robotic balancing,
shimmying wheels, wheel suspension systems).
Most of the research projects come from real industrial
problems. The primary research project is the dynamics of high-speed
machining processes. Accurate modelling of the regenerative effect of
the cutting process results in a time periodic delay-differential
equation. The effect of parameter change for both linear and nonlinear
cases is investigated. The aim of this research is to provide a guide
on the proper choice of the feed, depth of cut and spindle speed
parameters. |
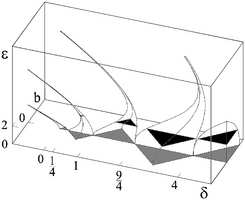
| The associated basic mathematical problem is how the
stability properties of the delayed Mathieu equation
\(\ddot{x}(t) + (\delta + \varepsilon \mbox{cos}{t}) x(t) = x(t - 2 \pi)\)
depend on its parameters. It has been proved that the
stability chart of the delayed Mathieu equation is a kind of
combination of the Strutt-Ince chart and the Hsu-Bhatt
chart.
|
 |
| |
Stability chart
for the delayed Mathieu equation. |
Another research area is the control of robot motions,
where time delay comes from the sampling time of the digital
controller and from the delay of the signals in the information
transmission system. In these systems, the time delay itself is time
varying as well, due to the sampling effect. Some results of this
research has already been accomplished in the
REHAROB
Project. REHAROB is a robotic rehabilitation system for upper-limb
motion therapy for the disabled. The therapy is driven by industrial
robots utilising intelligent identification of the required
physiotherapy motions. The teaching process of the robot is done by
force control, the robot follows the path driven by the
physiotherapist. During the design of the control concept, the delays
and the sampling effect played an essential role in the system
performance.
 |
 |
| The robot as a physiotherapist. |
Shimmy experiment on running
belt. |
Undesired rolling dynamics of many physical rolling systems such as
aircraft nose wheels, motorcycles, automotive systems and
tractor-trailer systems call the attention to the problem of shimmying
wheels. The shimmy phenomenon can also be modelled by delayed
dynamical systems due to the contact between the ground and the
elastic tyre of the wheel that exhibits memory effects.
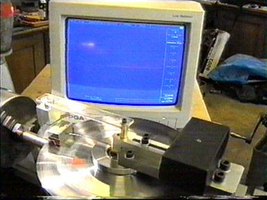
Test rig for demonstrating stick-slip
phenomena. |
In most of the above engineering problems, nonlinear
analysis pointed to the possible existence of unstable periodic motion
about otherwise stable equilibria and stationary motion of the
systems. The corresponding subcritical Hopf bifurcations were also
often identified experimentally. Stick-slip phenomena serve as nice
examples of demonstrating these theoretical results by
experiments. The subcritical Hopf bifurcation was shown on an
accurately designed test rig. |
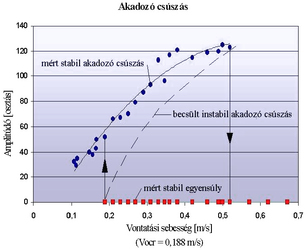 |
| Measured subcritical Hopf bifurcation (with
some clarifying explanation in Hungarian) |
Human balancing is also affected by time delays, namely, by the
delays of our reflexes. The Delayed Dynamical Systems research group
in Budapest celebrates the event of a colleague obtaining a PhD degree
at a bowling club, where the mechanics subjects on rolling, sliding,
friction, impact, gyroscopic effect, etc. are all studied
experimentally in a relaxed atmosphere. At these occasions, the
alcohol content of the consumed lager and beer is also tested by
checking the critical reflex delays where small amplitude oscillations
arise at the vertical position of the celebrated researchers via Hopf
bifurcations. For details, see our publication lists at
http://www.mm.bme.hu/.
 |
| Bowling: 3D sliding and
rolling |