My Lunch with Arnol'd
by Gábor Domokos
I thank Jim Papadopoulos for the
pre-Arnol'd version of the problem described here and Andy Ruina for
encouraging me to write this story down and then editing it.
In Hungary I teach Civil Engineering. I lean more
towards the mathematical side of the subject than to designing
buildings. Just after the political changes swept over the country in
the late 1980s I got a Fulbright Fellowship to visit America, to an
engineering department known to have people with mathematical tastes
like mine. I had a good year writing papers with various American
Professors. One of them was Andy Ruina, with whom I became friends and
had an infinite number of conversations on not quite as many
topics. One recurrent theme was Andy's friend Jim Papadopoulos, a guy
with academic taste but not an academic job. Through Andy I respected
the unseen Jim.
One day Andy told me that Jim had a simple
conjecture, but that Jim was too busy with his day job, designing
machines to refill laser toner cartridges, to work on trying to prove
it. Jim offered through Andy, as a gift of sorts, that I could work on
the problem.
Jim imagined drawing a closed curve on a thick
piece of plywood. A convex curve, meaning that it had no indented
places. A circle, an ellipse and a rectangle are convex curves and a
heart-shape is not. Now cut along that line with a jigsaw and balance
the plywood piece, on edge, on a flat table. Gently keep it on edge
so it doesn't fall flat on the table. In mathematical language, think
of this as a two-dimensional (2D) problem. This plywood is only stable
in certain positions. For example a square piece of plywood is stable
on all four edges. In the positions where one diagonal or the other is
vertical the plywood is in equilibrium, but it is an unstable
equilibrium. A tiny push and it will fall towards lying on one of the
edges. An ellipse is in stable equilibrium when horizontal and resting
on one of the two flatter parts. And the same ellipse is in
unstable equilibrium when balanced on either end, like an
upright egg. Jim conjectured that no matter what convex shape you draw
and cut out, it has at least two orientations where it is stable. The
ellipse has two such positions, a triangle has three (the three flat
edges), a square has four, a regular polygon has as many stable
equilibrium positions as it has edges. And a circle is a degenerate
special case that is in equilibrium in every orientation (none of
which are stable or unstable). Jim's conjecture was that every
shape, but for a circle, has at least as many stable positions as an
ellipse has: two.
Jim's plywood conjecture was a simple idea, and it
was true for every shape we could think of. Of course it is not true
if you are allowed to add weights. For example, you can put a big
weight in a plywood ellipse near one of the sharp ends, so the only
stable configuration is standing upright, like a child's toy called
the 'comeback kid'. We didn't allow that. We only allowed
homogeneous shapes, uniform plywood.
After some days of thought and talk with Andy, Jim
and others, we found a proof that showed that every convex piece of
plywood has at least two orientations where it would stand stably.
Then we generalized the idea to include things made from wire. We
published the results in the respectable but not widely read
Journal of Elasticity.
What kept bugging us was the 3D generalization.
Imagine something made of solidified clay. Was it true that you could
always find at least two orientations for such a thing where it would
sit stably on a table? We couldn't prove this, and for good reason.
Finally I found a counterexample; I found a shape that could only
balance stably on a table in just one position. Take a long solid
cylinder and diagonally chop off one end, then at the opposite angle
chop off the other end. This truncated cylinder is happy lying on the
table with its long side down, but in no other position. Just one
stable equilibrium. We never published this and I stopped thinking
about balancing plywood shapes, wire loops and clay solids.
About 5 years later there was the International
Congress on Industrial and Applied Mathematics in Hamburg. This was to
be the biggest mathematics meeting ever with over 2000 people
attending. Coming from a second-world country I needed, applied for,
and got a little first-world money so I could attend. The meeting had
over 40 parallel sessions. At any one time of the day I had a choice
of over 40 different talks I could listen to. My own talk was on
something I thought was profound at that time. But it was put in the
wrong session. To an outsider math might seem like math. But either
the subject is broad or mathematicians are narrow; the number of talks
that any single conference attendee could hope to understand was
small. Although my audience sat politely through my carefully
practiced 15-minute presentation, I don't think any of the few who
understood my English understood a word of my mathematics. Mine seems
not to have been the only misplaced talk, I didn't understand any of
the talks I went to either. Besides thousands of these
incomprehensible 15-minute talks there were three simultaneous
45-minute long invited talks each day.
Most centrally, there was one plenary talk with no
simultaneous sessions. All 2000 mathematicians could attend without
conflict. This plenary lecture was to be presented by no less than
Vladimir Igorevich Arnol'd, the man who solved Hilbert's thirteenth
problem when he was a teenager and the author of countless famous
articles, reviews, books and theorems.
Like everyone else I felt obligated to go despite,
again like everyone else, having little hope of understanding anything
of this great man's work. There was a general steady murmur as Arnol'd
started his talk; people chatting to their friends whom they
understood rather than listening to Arnol'd whom they had no hope of
understanding. When a talk is over my head I either switch off
completely, as I did for most of the conference talks, or try to catch
a detail here or there that might fit together loosely in my mind
somehow. I did the latter until my breath was taken away. Arnold's
talk made excursions into various topics that I don't know about, like
differential geometry and optics. But each topic ended with something
about the number four. He said these topics were examples of a theorem
created by the great nineteenth-century mathematician Jacobi. He said
Jacobi's theorem had many applications, and that always something had
to be bigger or equal to four. He covered one topic or another that
would be familiar to each person in the audience, always coming back
to the number four. After everyone in the audience had seen the number
four appear in some problem that he knew something about, the murmers
of distracted conversation quieted. The giant auditorium became next
to silent, with people practically holding their breaths in
attentiveness. Four in this problem, four in that, four in some
problem or other that everyone could understand. Four, four, four. My
respect for Arnol'd grew. Being a brilliant mathematician is one
thing. Riveting 2000 mathematicians who mostly can't understand each
other is another. Although I didn't understand the lecture, I felt
exhilarated and happy. As I left the auditorium it suddenly struck me
that Jim's plywood and wire problem might be related to Jacobi's
theorem. We had proved that at least two stable equilibria existed,
but this implies that there are at least four equilibria, two stable
and two unstable. Like the ellipse. Arnold's four. I was so impressed
with myself that I stopped dead for a minute, blocking the exit.
I had to tell this to Arnol'd. Maybe the number
four was a coincidence, maybe not. He would know. But of course
Arnol'd was mobbed after the talk. I realized that getting face to
face with the great man might be impossible. But almost immediately I
noticed a big poster. The conference organizers were advertising
special lunches. For an exorbitant fee one could buy a ticket to eat
with a math celebrity. Although my budget was tight and my mathematics
is not at the level of Arnol'd, I could calculate that if I reduced my
eating from two hotdogs a day to one I could afford a lunch ticket
with the great Professor.
The lunch was a disaster, both from my point of
view and Arnold's. The organizers had tried to maximize their profit
rather than the ticket-buyers' pleasure. At the big round table with
Arnol'd were ten eager young mathematicians. Each was carrying one or
two 'highly important' scientific papers which were full of 'highly
relevant' results which they wanted to share with Arnol'd. He could
not eat as they held out their papers and made claims about their
great original contributions. And unless I was willing to butt into
this noisy whining, like each of the people was doing to the others, I
could not speak. I sat and tried to look attentive at the pathetic
scene. At the end of the meal Arnol'd finally asked me "And what is
your paper about?" I said "nothing." "Surely you have something
to ask or say" he said. But I was depressed by the fray and said no, I
had just wanted to listen. The big meeting went on day after day. I
ate one hotdog a day and I went to a hundred 15-minute talks that I
didn't understand.
On the last day I packed my suitcase and headed for
the airport. The main lobby of the conference center was deserted,
maintenance people were taking down posters, the buffet was closed,
people were fading out. As I strolled across the big hall I noticed,
next to a young Asian man, leaning on a counter near the closed
buffet, Professor V.I. Arnol'd. The young Asian man was talking
excitedly in the tone I had seen at the disastrous lunch. As I walked
closer, Arnol'd raised his voice slightly.
"As I told you already several times, there is
nothing new in what you are telling me. I published this in 1980. Look
it up. I do not want to discuss this further; moreover, I have an
appointment with the gentleman carrying the suitcase over there. Good
bye."
The disappointed Asian mathematician got up to
leave and Arnol'd turned to me. "You wanted to talk to me, right?"
Stunned that he even remembered me, but aware of the part I suddenly
was supposed to play, I pretended that the discussion was
expected. "You sat at the lunch table, right? You must have had a
reason. What is it about? Tell me fast. I have to catch my train."
We sat down, I collected my thoughts and explained
about the plywood and the wire and how they gave the number two which
really meant four. He stared off without saying a word. After five
minutes I asked him if he wanted to know how we proved that the
plywood had at least four equilibria. He waved me away
impatiently. "Of course I know how you proved it" and then breezily
outlined the proof in a few phrases. "That is not what I am thinking
about. The question is whether your result follows from the Jacobi
theorem not."
He stared off again. I reminded him of his train
but he waved me away again. Looking at his enormous concentration, and
not knowing what I should be thinking about, the minutes went by
slowly. Finally he said "I think the Jacobi theorem and your problem
are related, but yours is certainly not an example of the other. I
think there is a third theorem that includes both Jacobi's theorem and
your problem. I could tell better if I knew about the 3D version of
your problem."
I proudly described the counterexample, the single
stable equilibrium of the chopped-off cylinder but he cut me off:
"You realize of course that this is not a
counterexample! The main point of your 2D result was NOT to show that
there are two or more stable equilibria, but to show that there are
FOUR or more equilibria altogether." This was not the main point of
our 2D result in my mind, or at least hadn't been. But now I realized
that there was a higher level of thought going on here. Four and not
two. "And your cylinder has four equilibria, three of which are
unstable."
In a moment's pondering I realized he was
right. The cylinder could also balance unstably when rotated 180
degrees on its axis and also on its two ends. Four. I was stunned. "A
counterexample may still exist. Send me when you found a body with
less than four equilibria in the three-dimensional case" he said, "I
have to catch my train. Good bye young man, and good luck to you!"
I returned to Hungary and my life of teaching and
pretty little irrelevant problems, each important in my mind for a few
months or years. It is possible that, besides the proofreader at the
Journal of Elasticity, no-one's eyes have ever passed at all over our
paper on plywood and wire. Ten years later Arnold's conjecture turned
out to be correct --- the
three-dimensional counterexample not only
existed but appeared to me as a mathematically most exciting object. I
never saw Arnol'd again. Besides the number four, and four again, I
still have no idea what the Jacobi theorem is about. So I will never
understand the generalization of Jacobi's theorem that V.I. Arnol'd
cooked up in order to encompass our balancing plywood and wire, cooked
up there in the huge convention hall in Hamburg, Germany, sitting next
to me at the deserted buffet.
Mono-monostatic bodies: The answer
to Arnol'd's question
P. L. Várkonyi and G. Domokos
Budapest University of Technology and Economics
Department of Mechanics, Materials and Structures and
Center for Applied Mathematics and Computational Physics
Abstract
V.I. Arnol'd conjectured that convex, homogeneous
bodies with less than four equilibria (also called
mono-monostatic) may exist. Not only turned his conjecture out
to be true, the newly discovered objects show various interesting
features. Our goal is to give an overview of these findings based on
[12] as well as to present some new results. We
will point out that mono-monostatic bodies are neither flat, nor thin,
they are not similar to typical objects with more equilibria and they
are hard to approximate by polyhedra. Despite these 'negative' traits,
there seems to be strong indication that these forms appear in Nature
due to their special mechanical properties.
1. Do mono-monostatic bodies exist?
In his recent book [2]
V.I. Arnol'd presented a rich collection of problems sampled from his
famous Moscow seminars. As Tabachnikov points out in his lively review
[11], one of the central themes concern the
geometrical and topological generalizations of the classical Four
Vertex Theorem [3], stating that a plane curve
has at least four extrema of curvature. The condition that some
integer is at least four appears in numerous different problems
in the book, in areas ranging from optics to mechanics. Being one of
Arnold's long-term research interests, this was the central theme to
his plenary lecture in 1995, Hamburg, at the International Conference
on Industrial and Applied Mathematics, presented to more than 2000
mathematicians. The number of equilibria of homogeneous, rigid bodies
offers a big temptation to believe in yet another emerging example of
being at least four (in fact, the planar case was proven
to be an example [7]). Arnol'd resisted and
conjectured that, counter to everyday intuition and experience, the
three-dimensional case might be an exception. In other terms, he
suggested that convex, homogeneous bodies with less than four
equilibria (also called mono-monostatic) may exist. As
often before, his conjecture not only proved to be correct, it opened
up an interesting avenue of mathematical thought coupled with physical
and biological applications, which we explore below.
2. Why are they special?
We consider bodies resting on a horizontal surface,
in the presence of uniform gravity. Such bodies with just one
stable equilibrium are called monostatic and they appear to be
of special interest. It is easy to construct a monostatic body, such
as a popular children's toy called 'comeback kid'; see
Figure 1(A). However, if we look for
homogeneous, convex monostatic bodies, the task is much more
difficult. In fact, in the 2D case one can prove [7] that among planar (slab-like) objects rolling
along their circumference no monostatic bodies exist. (This
statement is equivalent to the famous Four-Vertex theorem [3] in differential geometry.)
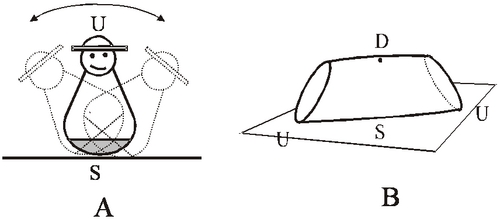 |
Figure 1: A: Children's toy
with one stable and one unstable equilibrium: inhomogeneous,
mono-monostatic body), also called the 'comeback kid'.
B: Convex, homogeneous solid body with one stable equilibrium
(monostatic body). In both plots, S, D and U denote points of the
surface corresponding to stable, saddle type and unstable equilibria
of the bodies, respectively. |
The proof for the 2D case is indirect and runs as
follows. Consider a convex, homogenous planar 'body' B and a
polar coordinate system with origin at the center of gravity of
B. Let the continuous function R(φ) denote the
boundary of B. As demonstrated in [7],
non-degenerated stable/unstable equilibria of the body correspond to
local minima/maxima of R(φ). Assume that R(φ)
has only one local maximum and one local minimum. In this case there
exists exactly one value φ = φ0 for which
R(φ0 ) = R(φ0 +
π), moreover, R(φ) > R(φ0
) if π > φ - φ0 > 0, and
R(φ) < R(φ0 ) if
< π < φ - φ0 < 0; see
Figure 2(A). The straight line φ =
φ0 (identical to φ = φ0 + π)
passing through the origin O cuts B into a 'thin'
(R(φ) < R(φ0 )) and a
'thick' (R(φ) > R(φ0
)) part. This implies that O cannot be the center
of gravity, i.e., it contradicts the initial assumption.
Not surprisingly, the 3D case is more complex.
Although one can construct a homogeneous, convex monostatic body
(cf. Figure 1(B)), the task is far less
trivial if we look for a monostatic polyhedron with a minimal
number of faces. Conway and Guy [4]
constructed such a polyhedron with 19 faces (similar to the body in
Figure 1(B)); it is still believed that this is
the minimal number. It was shown by Heppes [9]
that no homogeneous, monostatic tetrahedron exists. However, Dawson
[5] showed that homogeneous, monostatic simplices
exist in d = 10 dimensions. More recently, Dawson and Finbow
[6] showed the existence of monostatic tetrahedra,
however, with inhomogeneous mass density.
One can construct a rather transparent
classification scheme for bodies exclusively with non-degenerate
balance points, based on the number and type of their equilibria. In
2D, stable and unstable equilibria always occur in pairs, so we say
that a body belongs to class {i} (i > 0) if it has
exactly S = i stable (and thus, U = i unstable)
equilibria. As we showed above, class {1} is empty. In 3D we
appeal to the Poincaré-Hopf Theorem [1]
stating for convex bodies that S + U - D = 2, S, U, D
denoting the number of local minima, maxima, and saddles of the body's
potential energy, so class {i,j} (i, j > 0) contains
all bodies with S = i stable, U = j 'unstable' and D
= i + j - 2 saddle-type equilibria.
Monostatic bodies are in classes {1,j}; we
will refer to the even more special class {1,1} with just one
stable and one unstable equilibrium as mono-monostatic. While
in 2D being monostatic implies being mono-monostatic (and vice versa),
the 3D case is more complicated: a monostatic body could have, in
principle, any number of unstable equilibria (e.g., the body in
Figure 1(B) belongs to class {1,2}
and has four equilibria altogether, as pointed out by
Arnol'd). Arnold's conjecture was that class {1,1} is not
empty, i.e., homogeneous, convex mono-monostatic bodies exist.
Before we outline the construction of such an object we want to
highlight its very special relation to other convex bodies.
Intuitively it seems to be clear that by applying
small, local perturbations to a surface, one may produce additional
local maxima and minima (close to existing ones), similar to the 'egg
of Columbus'. According to some accounts, Christopher Columbus
attended a dinner, which a Spanish gentleman had given in his honor.
Columbus asked the gentlemen in attendance to make an egg stand on one
end. After the gentlemen successively tried to and failed, they stated
that it was impossible. Columbus then placed the egg's small end on
the table, breaking the shell a bit, so that it could stand
upright. Columbus then stated that it was "the simplest thing in the
world. Anybody can do it, after he has been shown how!" In [12] we showed, in an analogous manner, that one can
add stable and unstable equilibria one by one by locally
taking away small portions of the body. Apparently, the inverse is not
possible, i.e., for a typical body one can not decrease the
number of equilibria via small perturbations.
This result indicates the special status of
mono-monostatic bodies among other objects. For any given typical
mono-monostatic body one can find bodies in an arbitrary class
{i,j} which have almost the same shape. On the other
hand, to any typical member of class {i,j} (i, j >
1), one cannot find a mono-monostatic body that has almost the
same shape. This may explain why mono-monostatic bodies do not occur
often in Nature, and also why it is difficult to visualize such a
shape. Next we will demonstrate such an object.
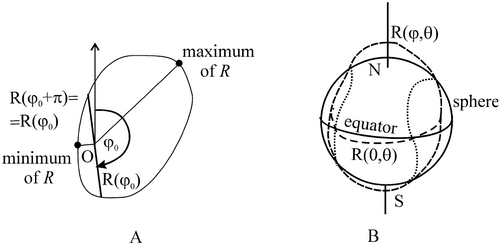 |
Figure 2: A: Example of a
convex, homogenous, planar body bounded by R(φ) (polar distance
from the origin O). Assuming R(φ) has only two local extrema, the
body can be cut to a 'thin' and a 'thick' half by the line φ =
φ0 . Its center of gravity is on the
'thick' side, in particular, it cannot coincide with O, so we have
contradiction.
B: 3D body (dashed line) separated into a 'thin' and a 'thick' part by
a tennis ball-like space curve C (dotted line) along which R =
R0 . Continuous line shows a sphere of radius
R0 , which also contains the curve
C. |
3. What are they like?
Similar to the planar case, a mono-monostatic 3D
body can be cut to a 'thin' and a 'thick' part by a closed curve on
its boundary, along which R( θ, φ) is
constant. If this separatrix curve happens to be planar, its existence
leads to contradiction, similar to the 2D case. (If, for example, it
is the 'equator' φ = 0 and φ > 0/φ < 0
are the thick/thin halves, the center of gravity should be on the
upper (φ > 0) side of the origin). However, in case of a
generic, spatial separatrix the above argument does not apply
anymore. In particular, the curve can be similar to the ones on the
surfaces of tennis balls; see Figure 2(B). In
this case the 'upper' thick ('lower' thin) part is partially below
(above) the equator, thus it is possible to have the center of gravity
at the origin. Our construction will be of this type. We define a
suitable two-parameter family of surfaces R( θ,
φ, c, d) in the spherical coordinate system (r, θ,
φ) with -π/2 < φ < π/2 and 0 <
θ < 2π, or φ = ±π/2 and no
θ-coordinate, while c > 0 and 0 < d < 1
are parameters. Conveniently, R can be decomposed in the
following way:
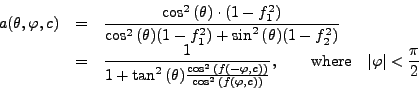
| R(
θ, φ, c, d) = 1 + d ΔR( θ, φ,
c), |
(1) |
where ΔR denotes the type of deviation
from the unit sphere. 'Thin'/'thick' parts of the body are
characterized by negativeness/positiveness of ΔR (i.e.,
the separatrix between the thick and thin portions will be given by
ΔR = 0), while the parameter d is a measure of how
far the surface is to the sphere. We will choose adequately small
values of d to make the surface convex. Now we proceed to
define ΔR.
We will have the maximum/minimum points of
ΔR (ΔR = ±1) at the North/South Pole
(φ = ±π/2). The shapes of the thick and thin
portions of the body are controlled by the parameter c: for
\(c \gg 1\) the separatrix will approach the equator, for
smaller values of c the separatrix will become similar to the
curve on the tennis ball.
Consider the following smooth, one-parameter
mapping
\(f(\varphi, c): (-\pi/2, \pi/2) \to (-\pi/2, \pi/2)\):
![\begin{displaymath}f(\varphi, c) = \pi \cdot \left[ \frac{e^{\left[ \frac{\var... ...ac{1}{2 c} \right]} - 1}{e^{1/c} - 1} - \frac{1}{2} \right].\end{displaymath}](/Portals/DSWeb/EasyGalleryImages/2/1659/ma_ar_000001284.png) |
(2) |
For large values of the parameter (\(c \gg 1\)), this mapping is almost the identity, however, if c is close to 0, there is a large deviation from
linearity. Based on (2), we define the related
maps
| f1( φ, c) = sin( f( φ,
c)) |
(3) |
and
| f2( φ, c) =
-f1( -φ, c). |
(4) |
These two functions are used to obtain ΔR(
θ, φ, c) = f1( φ, c) if θ = 0 or
π (i.e., a big portion of these sections of the body lie in the
thin part; cf. Figure 2(B)) and ΔR =
f2 if θ = π/2 or 3π/2 (the majority of
these sections are in the thick part). The function
 |
(5) |
is used to construct ΔR as a `weighted
average' type function of f1 and
f2 in the following way:
 |
(6) |
|
The choice of the
function a guarantees, on one hand, the gradual transition from
ƒ1 to ƒ2 if θ is
varied between 0 and π/2, on the other hand, it was chosen to
result in the desired shape of thick/thin halves of the body; this is
illustrated in Figure 2(B). The function R
defined by equations (1)-(6) is
illustrated in Figure 3 for intermediate values of
c and d. For \(c \gg 1\), the constructed surface R = 1 + d ΔR is
separated by the φ = 0 equator into two unequal halves: the upper
(φ > 0) half is `thick' (R > 1) and the lower (φ
< 0) half is `thin' (R < 1). By decreasing c, the
line separating the `thick' and `thin' portions becomes a space curve,
thus the thicker portion moves downward and the thinner portion
upward. As c approaches zero, the upper half of the body
becomes thin and the lower one becomes thick; cf.
Figure 4.
|
|
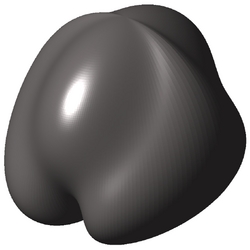 |
| Figure 3: Plot of the body if
c = d = 1/2. |
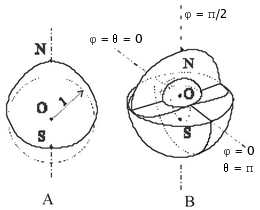 |
Figure 4: A: Side view of the body
if \(c \gg 1\) (and d approximately 1/3). Note
that ΔR > 0 if φ > 0 and ΔR < 0 if φ <
0.
B: Spatial view if \(c \ll 1\). Here, ΔR > 0 typically for φ < 0 and vice versa. |
In [12] we proved analytically
that there exists ranges for c and d where the body is
convex and the center of gravity is at the origin, i.e. it belongs to
class {1,1}. Numerical studies suggest that d must be
very small (d < 5 × 10–5 ) to
satisfy convexity together with the other restrictions, so the created
object is very similar to a sphere. (In the admitted range of d
the other parameter c is approximately 0.275.)
4. What are they not like?
Intuitively, it appears to be clear that
mono-monostatic bodies can be neither very flat nor very
thin; the former shape would have at least two stable, the
latter one at least two unstable equilibria. To make this intuition
more exact we define the flatness F and thinness T of a
body. Draw a closed curve c on the surface, traced by the
position vector R(s), s in [0, 1], from the center of gravity
O. Pick two points Pi (i = 1, 2) on
opposite sides of c, with position vectors Ri
(i = 1, 2), respectively. We define the flatness and thinness
as
Although F and T are hard to compute
for a general case, it is easy to give both a problem-specific and a
general lower bound. For the latter we have
 |
(7) |
since F = T = 1 can always be obtained by
shrinking the curve c to a single point. For 'simple' objects
F and T can be determined and the values agree fairly
well with intuition:
Table 1:
The flatness and thinness of some 'simple' objects.
| Body |
Flatness F |
Thinness T |
| Sphere |
1 |
1 |
| Regular tetrahedron |
\(\sqrt{3}\) |
\(\sqrt{3}\) |
| Cube |
\(\sqrt{2}\) |
\(\sqrt{3/2}\) |
| Octahedron |
\(\sqrt{3/2}\) |
\(\sqrt{2}\) |
| Cylinder with radius r, height 2h,
\(z= \sqrt{r^2 + h^2}\) |
z/h |
z/r |
| Ellipsoid with axes a < b < c> |
b/a |
c/b |
|
Now we show that F and T are related
to the number S of stable and U of unstable equilibria
by
| Lemma 1
|
a) |
F = 1 if, and only if, S =
1 and |
| b) |
T = 1 if, and only if,
U = 1. |
We only prove a), the proof of b) runs
analogously. If S > 1 then there exists one global minimum
for the radius R and at least one additional (local)
minimum. Select c as a closed R = R0 =
constant curve, circling the local minimum very closely. Select the
points P1 and P2 coinciding with
global and local minima, respectively. Now we have
\(R_1 \leq R_2 < R_0\) and min(R(s)) =
R0, max(R(s)) = R2, so
S > 1 implies F > 1.
If S = 1 then R has only one minimum,
so it assumes only values greater or equal than min(R(s)) on
one side of the curve c, so F is less than or equal to
1, but due to (7) we have F = 1.
Q.e.d.
Lemma 1 confirms our
initial intuition that mono-monostatic bodies can be neither flat, nor
thin. In fact, they have simultaneously 'minimal' flatness and
'minimal' thinness; moreover, they are the only nondegenerate bodies
having this property.
Another interesting, though somewhat 'negative'
feature of mono-monostatic bodies is the apparent lack of any simple
polyhedral approximation. As we mentioned before, the existence of
monostatic polyhedra with minimal number of faces has been
investigated in the mathematical community [4,5,6,9]. One
may generalize this problem to the existence of polyhedra in class
{i,j}, with minimal number of faces. Intuitively it appears to be
evident that polyhedra exist in each class: if we construct a
sufficiently fine triangulation on the surface of a smooth body in
class {i,j} with vertices at unstable equilibria, edges at
saddles and faces at stable equilibria, then the resulting polyhedron
may — at sufficiently high mesh density and appropriate mesh
ratios — 'inherit' the class of the approximated smooth body. It
also appears to be true that if the topological inequalities
\(2 i \geq j + 4\) and
\(2 j \geq i + 4\) are valid then we can have 'minimal'
polyhedra, where the number of stable equilibria equals the number of
faces, the number of unstable equilibria equals the number of vertices
and the number of saddles equals the number of edges. Much more
puzzling appear to be the polyhedra in classes not satisfying the
above topological inequalities: a special case of these polyhedra are
monostatic ones, however, many other types belong here as well. In
particular, it would be of special interest to know the minimal number
of faces of a polyhedron in class {1,1}. We can imagine such a
polyhedron as an approximation of a smooth mono-monostatic body. Since
the latter are close to the sphere (they are neither flat nor thin),
the number of equilibria is particularly sensitive to perturbations,
so the minimal number of faces of a mono-monostatic polyhedron may be
a very large number.
5. Mono-monostatic bodies do exist
Arnold's conjecture proved to be correct: there
exist homogeneous, convex bodies with just two equilibria; we called
these objects mono-monostatic.
Based on the results presented so far, one gets
invariably the impression that mono-monostatic bodies are
hiding, i.e., they are hard to visualize, hard to describe and
hard to identify. In particular, we showed that their form is not
similar to any typical representative of any other
equilibrium class. We also showed that they are neither flat, nor
thin; in fact, they are the only nondegenerate objects having
simultaneously minimal flatness and thinness. Imagining their
polyhedral approximation seems to be a futile effort as well: the
minimal number of faces for mono-monostatic polyhedra might be very
large. The extreme physical fragility of these forms (i.e. their
sensitivity to local perturbations due to abrasion) was also confirmed
by statistical experiments on pebbles (reported in [12]); in a sample of 2000 pebbles not a single
mono-monostatic object could be identified. Apparently,
mono-monostatic bodies seem to escape everyday human intuition.
 |
| Figure 5: Mono-monostatic body
(the Gömböc) and Indian Star Tortoise
(Geochelone
Elegans). |
They certainly did not escape Arnold's intuition.
Neither does Nature seem to ignore these mysterious objects: being
monostatic can be a life-saving property for land animals with a hard
shell, e.g. beetles and turtles. In fact, the 'righting response'
(i.e., their ability to turn back when placed upside down) of these
animals is often regarded as a measure of their ecological fitness
([8,10]). Although the
example presented in Section 2
proved to be practically indistinguishable from the sphere, rather
different forms are also included in the mono-monostatic class. In
particular, we identified one of these forms, which not only shows
substantial deviation from the sphere, it also displays remarkable
similarity to some turtles and beetles; we named this object the
Gömböc. We built the
Gömböc by using
3D printing technology and in Figure 5 it can
be visually compared to an Indian Star Tortoise (Geochelone
Elegans).
Needless to say, the analogy is incomplete, turtles
are neither homogeneous nor mono-monostatic. (They do not need to be
exactly mono-monostatic; righting is assisted dynamically by the
motion of the limbs.) On the other hand, being that close to a
mono-monostatic form is probably not just a coincidence; as we
indicated before, such forms are unlikely to be found by chance,
either by men or by Evolution itself.
Acknowledgement
The support of OTKA grant TS49885 is gratefully
acknowledged.
Bibliography
| 1. |
V.I. Arnol'd,
Ordinary Differential Equations,
10th printing, MIT Press (1998). |
| 2. |
V.I. Arnol'd,
Arnold's problems,
Springer, Berlin-Heidelberg-New York & PHASIS, Moscow (2005). |
| 3. |
M. Berger and B. Gostiaux,
Differential Geometry: Manifolds, Curves and Surfaces,
Springer, New York (1988). |
| 4. |
J.H. Conway and R. Guy, "Stability of
Polyhedra", SIAM Rev. 11 (1969), 78-82. |
| 5. |
R. Dawson, "Monostatic simplexes",
Amer. Math. Monthly 92 (1985), 541-646. |
| 6. |
R Dawson and W. Finbow,
"What shape is a loaded die?"
Mathematical Intelligencer 22 (1999), 32-37. |
| 7. |
G. Domokos, J. Papadopoulos, and
A. Ruina, "Static equilibria of planar, rigid bodies: is there
anything new?" J. Elasticity 36 (1994), 59-66. |
| 8. |
S. Freedberg, A.L. Stumpf,
M.A. Ewert, and C.E. Nelson,
"Developmental environment has long-lasting effects on behavioral
performance in two turtles with environmental sex determination",
Evolutionary Ecology Research 6 (2004), 739-747. |
| 9. |
A. Heppes,
"A double-tipping tetrahedron",
SIAM Rev. 9 (1967), 599-600. |
| 10. |
A.C. Steyermark and J.R. Spotila,
"Body temperature and maternal identity affect snapping turtle
(Chelydra serpentina) righting response",
COPEIA 4 (2001), 1050-1057. |
| 11. |
S. Tabachnikov,
"Review of Arnold's problems",
Mathematical Intelligencer (to appear). |
| 12. |
P.L. Várkonyi and G. Domokos,
"Static equilibria of rigid bodies: dice, pebbles and the
Poincaré-Hopf Theorem,
J. Nonlinear Science 16 (2006), 251-283. |